В своей статье я хотел бы подробно и с иллюстрациями рассказать про схему подключения и распиновку Arduino, рассматривая различные модели микроконтроллера.
Слово Uno переводится с итальянского языка, как «один». Устройство названо в связи с началом выпуска Arduino 1.0. Другими словами, Uno является эталонной моделью для всей платформы типа Arduino. Это последнее устройство в серии плат USB, доказавшее свою эффективность и проверенное временем.

Arduino Uno создано на микроконтроллере типа ATmega 328 (datasheet).
Его состав следующий:
Крайне важно отметить, что отличительной особенностью всех новых плат arduino является использование для интерфейсов USB–UART микроконтроллера типа ATmega 16U2 (или ATmega 8U2 в версиях R1, R2) вместо устаревшей микросхемы типа FTDI.
Плата Uno по версии R2 снабжается дополнительным подтягивающим к земле резистором на линии HWB применяемого микроконтроллера.

Распиновка выглядит следующим образом:
Устройство построено на микроконтроллере АTmega16U2 и имеет повышенный уровень помехоустойчивости по цепи сброса.

Устройство отличается от предыдущей версии лишь тем, что в этом случае не используется интерфейс USB-UART FTDI при подключении к компьютеру. Эту задачу выполняет выполняет сам микроконтроллер ATmega 16U2.
Изменения распиновки платы выглядят следующим образом:
Является одной из самых простых и удобных устройств Arduino.

Используется микроконтроллер ATmega 168 с рабочим напряжением на 5 вольт с частотой в 16 МГц. Максимальное напряжение питания в моделях составляет 9 вольт. Значение максимального тока на выводах составляет 40 mA.
Плата содержит:

Пины устройства Arduino Mini имеют следующее предназначение:
Расположение выводов в различных версиях arduino mini могут различаться.
Устройство Arduino Mega 2560 собрано на микроконтроллере ATmega 2560 (datasheet), является обновлённой версией Arduino Mega.

Для осуществления преобразования USB–UART-интерфейсов используется новый микроконтроллер ATmega 16U2 (либо ATmega 8U2 для версий плат R1 или R2).
Состав платы следующий:

В устройстве Mega 2560 R2-версии добавлен специальный резистор, подтягивающий HWB-линию 8U2 к земле, что позволяет значительно упростить переход Arduino в DFU-режим, а также обновление прошивки. Версия R3 незначительно отличается от предыдущих. Изменения в устройстве следующие:
Выводы предназначаются для следующего:
Arduino Micro представляет собой устройство, основа которого построена на микроконтроллере ATmega 32u4, имеющем встроенный USB-контроллер. Это решение упрощает подключение платы к компьютеру, так как в системе устройство будет определяться как обычная клавиатура, мышь либо COM-порт. Состав устройства следующий:

Все цифровые выводы изделия могут работать в качестве как входов, так и выходов благодаря наличию функций digital Read, pin Mode, digital Write. Напряжение на выводах составляет 5 вольт. Максимальная величина потребляемого или отдаваемого тока с одного вывода составляет 40 мА. Выводы сопрягаются с внутренними резисторами, которые по умолчанию находятся в отключенном состоянии. Они имеют номиналы в 20 кОм – 50 кОм. Отдельные выводы arduino micro, кроме основных, способны выполнять и ряд дополнительных функций:
Я приобрел свой первый Ардуин и хотел бы рассказать с чего начать чтобы он заработал. Откуда скачать программу схему подключения и тп. И что с ардуином вообще можно сделать.
О том, что такой Ардуин и с чем его «едят» я не буду рассказывать вы можете что такое Arduino почитать здесь. Arduin грубо говоря программная плата с возможностью подключения разных приемников и устройств вывода. Микроконтроллер. Обладая соответствующими знаниями его можно пустить в разные русла.
Заказал через интернет - Arduino с DX
Нужна была плата именно с надписями arduino и никак иначе, поэтому пришлось заплатить 28$, хотя XDruino (XDruino) или Zdruino (Zdruino) стоят дешевле.
Вот плата Arduino, сейчас будем подключать к компьютеру. Подключаем её в USB порт. Windows пытается обнаружить драйвер, но она этого сделать не сможет, поэтому переходим в диспетчер устройств (Мой компьютер -> Свойства -> Оборудование -> Диспетчер устройств). Видим, что у нас есть новое неизвестное устройство. Для того чтобы windows обноружил устройство как устройство Arduino MEGA 2560 нам необходимо скачать драйвера. Драйвера можно скачать с официального сайта, http://www.arduino.cc/. Заходим на вкладочку «скачать» (обозначено «1») и выбираем Arduino 1.0.5» (обозначено «2»), здесь есть и версия Arduino 1.5 » (обозначено «3») но она BETA версия, поэтому мы не будем её качать, мы скачаем версию 1.0.5. Это текущий релиз. Скачаем ZIP файл. Он весит 92.9 MByte.
Для того чтобы windows обноружил устройство как устройство Arduino MEGA 2560 нам необходимо скачать драйвера. Драйвера можно скачать с официального сайта, http://www.arduino.cc/. Заходим на вкладочку «скачать» (обозначено «1») и выбираем Arduino 1.0.5» (обозначено «2»), здесь есть и версия Arduino 1.5 » (обозначено «3») но она BETA версия, поэтому мы не будем её качать, мы скачаем версию 1.0.5. Это текущий релиз. Скачаем ZIP файл. Он весит 92.9 MByte. Скачиваем и распаковываем файл, в которой есть папка с драйверами. Открываем её, и находим в ней файл Arduino.inf который нужно скопировать поближе к корню диска, я его положу прямо на диск С. Теперь мне нужно указать в диспетчере устройств, вот этот *.inf файл. Я нажимаю что я хочу обновить драйвер, выбираю что я покажу где этот драйвер находится на моём компьютере. Выбираю папочку, я положил *.inf файл на диск С, и выбираю диск С. Именно поэтому я его положил ближе к корню, чтобы не лазить по всему компьютеру и убираю галочку «Включить подпапки». Нажимаю «Next».
Скачиваем и распаковываем файл, в которой есть папка с драйверами. Открываем её, и находим в ней файл Arduino.inf который нужно скопировать поближе к корню диска, я его положу прямо на диск С. Теперь мне нужно указать в диспетчере устройств, вот этот *.inf файл. Я нажимаю что я хочу обновить драйвер, выбираю что я покажу где этот драйвер находится на моём компьютере. Выбираю папочку, я положил *.inf файл на диск С, и выбираю диск С. Именно поэтому я его положил ближе к корню, чтобы не лазить по всему компьютеру и убираю галочку «Включить подпапки». Нажимаю «Next». Windows обнаружила этот *.inf файл и предлагает его установить. Тут какие-то проблемы с Windows, он этот драйвер не хочет принимать как безопасный, но мы всё равно его установим.
Windows обнаружила этот *.inf файл и предлагает его установить. Тут какие-то проблемы с Windows, он этот драйвер не хочет принимать как безопасный, но мы всё равно его установим. Вот и всё. У нас установилось это неизвестное устройство, на него уже стали дрова и оно видится как Arduino MEGA2560. Она сейчас висит на 3-ем COM порту.
Вот и всё. У нас установилось это неизвестное устройство, на него уже стали дрова и оно видится как Arduino MEGA2560. Она сейчас висит на 3-ем COM порту. Теперь с локального диска С мы удаляем этот *.inf файл потому что он нам уже не нужен, и закрываем окно.
Теперь с локального диска С мы удаляем этот *.inf файл потому что он нам уже не нужен, и закрываем окно.
В распакованной папке есть ярлык Arduino, который запускает среду программирования Arduino. Данную программу не нужно устанавливать, её просто нужно куда-то скопировать и можно запускать Arduino IDE из любого места. Запускаем её, и вот как она выглядит. Очень простая и удобная программа.
Теперь нужно указать последовательный порт на котором определилась плата
Выбираем плату, у нас Mega 2560, если у вас другая, вы выбираете другую.
И теперь можно залить сюда какой-то проект Arduino. Выберем проект Arduino, примеры, и выберем что-то с коммуникацией по последовательному порту, чтобы мы видели что мигают светодиоды. Ну допустим, MultiSerialMega.
Открывается исходный код примера, мы его можем проверить на ошибки (откомпилировать), нажав кнопку помеченной цифрой «1», либо можно сразу загрузить на микроконтроллер программу, нажав кнопку помеченной цифрой «2» . При этом компилятор сначала откомпилирует исходный текст, и только потом зальёт полученный файл на микроконтроллер. Обратите внимание, сейчас должны загореться какие-то светодиоды.
Давайте выберем другой пример. Мне хочется попробовать пример который бы постоянно что-то отправлял. Вот, например AnalogOutSerial. Перед каждым примером есть описание, что да как. Сразу зальём его на микроконтроллер (запрограммируем Arduino), для этого сразу жмём «загрузить», компилятор сразу выполнит компиляцию и потом всё загрузит. Вот всё загружено, и сейчас что-то передаётся, так как постоянно горит светодиод на передачу. Узнать что именно передаётся можно с помощью любого монитора COM порта. Мне очень нравится программа Terminal, но можно воспользоваться и средствами встроенными Arduino IDE. Arduino IDE имеет на своём борту «недомонитор COM порта», которым можно пользоваться когда нет ничего другого. Откроем мониторинг COM порта, и видит, что именно постоянно сюда передаётся.
Для чего вообще эти примеры? Я показал как программировать Arduino, можно убедиться что устройство работает, и нормально программируется.
Теперь нужно найти документацию на плату Arduino. Документацию на плату мы также находим на этом сайте. Переходим в раздел «Produkt» (http://arduino.cc/en/Main/Products), выбираем наш продукт, у меня Arduino Mega2560. Спускаемся немного ниже и видим интересные ссылки.
Первое это EAGLE файлы («1»), то есть разводка печатных плат сделана в орле. Также можно найти схему Arduino в формате *.pdf («2») и карту пинов («3»). То есть вся документация на Arduino есть, и лежит в открытом виде. Есть схема и разобраться что куда идёт и что за что отвечает, не оставит ни каких сложностей.
Всё больше набирает популярности, и уже Arduino подхватывает инициативу - добавляя эти Wi-Fi модули в список поддерживаемых плат.
Но как же его подключить к ардуино? И возможно как-то обойтись вообще без ардуино? Сегодня именно об этом и пойдёт речь в этой статье.
Забегая наперёд, скажу, что будет вторая статья, уже более практическая, по теме прошивки и программирования модуля ESP8266 в среде разработки Arduino IDE . Но, обо всём по порядку.
Этот видеоролик, полностью дублирует материал, представленный в статье.
На данный момент, существует много разновидностей этого модуля, вот некоторые из них:

А вот распиновка ESP01, ESP03, ESP12:

* Данную картинку можно посмотреть в хорошем качестве на офф. сайте pighixxx.com .
Лично мне, больше всего нравится версия ESP07. Как минимум за то, что тут есть металлический экран (он защищает микросхемы от внешних наводок, тем самым обеспечивает более стабильную работу), своя керамическая антенна, разъём для внешней антенны. Получается, подключив к нему внешнюю антенну, например типа биквадрат , то можно добиться неплохой дальности. К тому же, тут есть немало портов ввода вывода, так называемых GPIO(General Purpose Input Output - порты ввода-вывода общего назначения), по аналогии с ардуино - пинов.
Давайте вернёмся к нашим баранам Wi-Fi модулям и Arduino. В этой статье, я буду рассматривать подключение ESP8266(модели ESP01) к Arduino Nano V3.
Но, данная информация будет актуальна для большинства модулей ESP8266 и так же разных Arduino плат, например самой популярной Arduino UNO.
Пару слов по ножкам ESP01: 
Vcc и GND (на картинке выше это 8 и 1) - питание, на ножку Vcc можно подавать, судя по документации , от 3 до 3.6 В , а GND - земля (минус питания). Я видел, как один человек подключал этот модуль к двум AA аккумуляторам (напряжение питания в этом случае было примерно 2.7 В) и модуль был работоспособным. Но всё же разработчики указали диапазон напряжений, в котором модуль должен гарантированно работать, если вы используете другой - ваши проблемы.
Внимание! Этот модуль основан на 3.3 В логике, а Arduino в основном - 5 В логика. 5 В запросто могут вывести из строя ESP8266, потому на него нужно отдельно от ардуино подавать питание .
- На моей ардуинке есть ножка, где написано 3.3 В, почему бы не использовать её?
Наверное подумаете вы. Дело в том, что ESP8266 довольно таки прожорливый модуль, и в пиках может потреблять токи до 200 мА, и почти никакая ардуинка по умолчанию не способна выдать такой ток, разве что исключением является Arduino Due , у которой ток по линии 3.3 В может достигать 800 мА, чего с запасом хватит, в других же случаях советую использовать дополнительный стабилизатор на 3.3 В, например AMS1117 3.3 В . Таких валом как в Китае, так и у нас.

Ножка RST 6 - предназначена «железной» для перезагрузки модуля, кратковременно подав на неё низкий логический уровень, модуль перезагрузиться. Хоть и на видео я этим пренебрёг, но всё же вам советую «прижимать» данную ногу резистором на 10 кОм к плюсу питания , дабы добиться лучшей стабильности в работе модуля, а то у меня перезагружался от малейших наводок.
Ножка CP_PD 4(или по-другому EN ) - служит, опять же, для «железного» перевода модуля в энергосберегающий режим, в котором он потребляет очень маленький ток. Ну и снова - не будет лишним «прижать» эту ногу резистором на 10 кОм к плюсу питалова. На видео я тупо закоротил эту ногу на Vcc, потому как под рукой не оказалось такого резистора.
Ноги RXD0 7 TXD0 2 - аппаратный UART, который используется для перепрошивки, но ведь никто не запрещает использовать эти порты как GPIO(GPIO3 и GPIO1 соотвественно). GPIO3 на картинке почему-то не размечен, но в даташите он есть:
К стати, к ножке TXD0 2 подключен светодиод «Connect», и горит он при низком логическом уровне на GPIO1, ну или когда модуль отправляет что-то по UART.
GPIO0 5 - может быть не только портом ввода/вывода, но и переводить модуль в режим программирования. Делается это подключив этот порт к низкому логическому уровню(«прижав» к GND) и подав питание на модуль. На видео я делаю это обычной кнопкой. После перепрошивки - не забудьте вытащить перемычку/отжать кнопку(кнопку во время перепрошивки держать не обязательно, модуль при включении переходит в режим программирования, и остаётся в нём до перезагрузки).
GPIO2 3 - порт ввода/вывода.
И ещё один немаловажный момент, каждый GPIO Wi-Fi модуля может безопасно выдавать ток до 6 мА , чтобы его не спалить, обязательно ставьте резисторы последовательно портам ввода/вывода на… Вспоминаем закон Ома R = U/I = 3.3В / 0.006 А = 550 Ом, то есть, на 560 Ом . Или же пренебрегайте этим, и потом удивляйтесь почему оно не работает.
В ESP01 все GPIO поддерживают ШИМ, так что к нашим четырём GPIO, то есть GPIO0-3 можно подключить драйвер двигателя, аля L293 / L298 и рулить двумя двигателями, например катера, или же сделать RGB Wi-Fi приблуду. Да, да, данный модуль имеет на борту много чего, и для простеньких проектов скрипач Arduino не нужен, только для перепрошивки. А если использовать ESP07 то там вообще портов почти как у Uno, что даёт возможность уже уверенно обходиться без ардуино. Правда есть один неприятный момент, аналоговых портов у ESP01 вообще нет, а у ESP07 только один, ADC зовётся. Это конечно усугубляет работу с аналоговыми датчиками. В таком случае ардуино аналоговый мультиплексор в помощь.
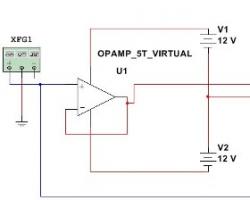
Всё вроде как по распиновке пояснил, и вот схема подключения ESP8266 к Arduino Nano:
Видите на Arduino Nano перемычка на ножках RST и GND? Это нужно для того, чтобы ардуинка не мешала прошивке модуля, в случае подключения ESP8266 при помощи Arduino - обязательное условие.
Так же если подключаете к Arduino - RX модуля должен идти к RX ардуинки, TX - TX. Это потому, что микросхема преобразователь уже подключена к ножкам ардуино в перекрестном порядке.
Так же немаловажен резистивный делитель, состоящий из резисторов на 1 кОм и 2 кОм (можно сделать из двух резисторов на 1 кОм последовательно соединив их) по линии RX модуля. Потому как ардуино это 5 В логика а модуль 3.3. Получается примитивный преобразователь уровней. Он обязательно должен быть, потому что ноги RXD TXD модуля не толерантные к 5 В.

Ну и можно вообще обойтись без ардуино, подключив ESP8266 через обычный USB-UART преобразователь. В случае подключения к ардуино, мы, по сути, используем штатный конвертер интерфейсов usb и uart, минуя мозги. Так зачем тратиться лишний раз, если можно обойтись и без ардуино вообще? Только в этом случае, мы подключаем RXD модуля к TXD конвертора, TXD - RXD.
Если вам лениво заморачиваться с подключением, возится с резисторами и стабилизаторами - есть готовые решения NodeMcu:

Тут всё значительно проще, воткнул кабель в компьютер, установил драйвера и программируй, только не забывай задействовать перемычку/кнопку на GPIO0 для перевода модуля в режим прошивки.
Ну вот, с теорией наверное всё, статья получилась пожалуй довольно таки большая, и практическую часть, аля прошивка и программирование модуля, я опубликую немного позже.
В уроке рассказывается, как установить программное обеспечение для работы с системой Ардуино под Windows 7, как подключить плату к компьютеру и загрузить первую программу.
Для установки программного обеспечения и подключения контроллера Arduino UNO R3 к компьютеру необходимы:
Плата может получать питание от USB порта компьютера, поэтому внешний блок питания не требуется.

Установка интегрированной среды разработки Arduino IDE.
Прежде всего, необходимо загрузить последнюю версию программы. Загрузить ZIP архив можно с официального сайта поддержки систем Ардуино по этой ссылке . Необходимо выбрать строку с нужной операционной системой – Windows ZIP file ...

Создать папку, например Arduino, и распаковать в нее zip файл.

Подключение платы Ардуино.
С помощью USB кабеля подключите плату к компьютеру. Должен загореться светодиод (с маркировкой ON), показывающий, что на плату поступает питание.
Установка драйвера.
Мне известны платы Arduino UNO R3 использующие в качестве моста USB-UART
Процессы установки драйверов для этих вариантов отличаются.
Установка драйвера для ARDUINO UNO с преобразователем интерфейсов ATmega16U2.
После подключения платы к компьютеру Windows сама начнет процесс установки драйвера. Через некоторое время появится сообщение о неудачной попытке.
Пуск –> Панель управления –> Система –> Диспетчер устройств .
В разделе Порты (COM и LPT) должно быть устройство Arduino UNO с предупреждающим желтым значком.
Щелкаем правой кнопкой мыши по значку.
Выбираем Обновить драйвер .
Вручную указать место размещения драйвера. Файл ArduinoUNO. inf находится в каталоге Drivers папки, куда распакован архив.
В разделе Порты (COM и LPT) появляется новый, виртуальный COM. Его номер надо запомнить.
Установка драйвера для ARDUINO UNO с преобразователем интерфейсов CH340G (китайский клон).
После подключения платы к компьютеру, Windows сама начнет процесс установки драйвера.

Через некоторое время появится сообщение о неудачной попытке.

Драйвер надо устанавливать вручную. Для этого переходим Пуск –> Панель управления –> Система –> Диспетчер устройств .
Появилось новое устройство USB2.0-Serial с желтым предупреждающим значком.
Запускаем установочный файл .

Выбираем INSTALL .
Ждем сообщение об успешной установке.

В диспетчере устройств появляется новое устройство USB-SERIAL CH340.

Необходимо запомнить номер COM порта.
Запуск интегрированной среды разработки Arduino IDE.
Запускаем файл arduino.exe.
Выбираем тип платы Ардуино: Инструменты -> Плата -> Arduino UNO .

Необходимо указать номер COM порта: Инструменты -> Порт .

При установке Arduio IDE должны автоматически поставиться драйверы, необходимые для работы с оригинальными платами Arduino. Но фишка в том, что на китайских платах стоит более дешёвый контроллер интерфейса USB, для работы с ним нужен специальный драйвер. Китайский контроллер ничем не хуже, он просто дешевле =)
Если по какой-то причине у вас не установились драйверы от Arduino, их можно установить вручную из папки с программой.
Драйвер CH341 для Windows можно скачать , либо самому поискать в гугле .
 |
Далее подключить Arduino к компьютеру, подождать, пока Windows её распознает и запомнит (первое подключение).
P.S. Вылезет окошечко, сообщающее, что устройство опознано и подключено к COM порту с определённым номером отличным от номера 1
По умолчанию в linux можно прошивать китайские ардуинки без дополнительного оборудования. Но вначале ничего не получается и Arduino IDE выдает ошибку.
Дело вот в чем. Linux (в моем случае linux mint) определяет ардуинку как устройство ttyUSB*. Обычно это ttyUSB0. Это можно узнать командой dmesg
в терминале.
То есть, в системе появляется интерфейс /dev/ttyUSB0
. Но чтобы с ним работать, нужны права доступа. Читать и писать на устройство /dev/ttyUSB0
имеет пользователь root и пользователи группы dialout. Работы с правами суперпользователя лучше избегать, поэтому следует занести своего пользователя в группу dialout. Это можно сделать следующей командой(обратите внимание, команда whoami в обратных кавычках)
sudo usermod -a -G dialout `whoami`
После этого нужно перелогиниться. Дальше запускаем Arduino IDE и в меню «Инструменты-Порт» ставим галочку напротив /dev/ttyUSB0
.
За инфу спасибо Владу Шеменкову